Quick Introduction to Deep Learning
GENE 46100 — Unit 00
2025-03-25
Course Roadmap
0 What is DL? Can we detect regulatory motifs in DNA?
MLP, CNN, DNA scoring 1–3
1
Can we learn the “language” of DNA?
Transformers & Genomic GPT
4–5
2
Can we predict gene regulation from sequence?
Enformer & Borzoi
6–7
3
Can we model microbial communities?
8–9
What Can Deep Learning Do in Genomics?
Predict TF binding from DNA sequence aloneScore regulatory variants without experimentsPredict gene expression from 200kb of sequence (Enformer)Generate protein structures (AlphaFold)Build DNA language models that learn grammar of the genome
These models learn patterns we didn’t know to look for.
Today’s Learning Objectives
Understand and implement gradient descent to fit a linear model
See why linear models fail on nonlinear data
Build a multi-layer perceptron (MLP) that succeeds
Learn the basics of PyTorch : model, loss, optimizer
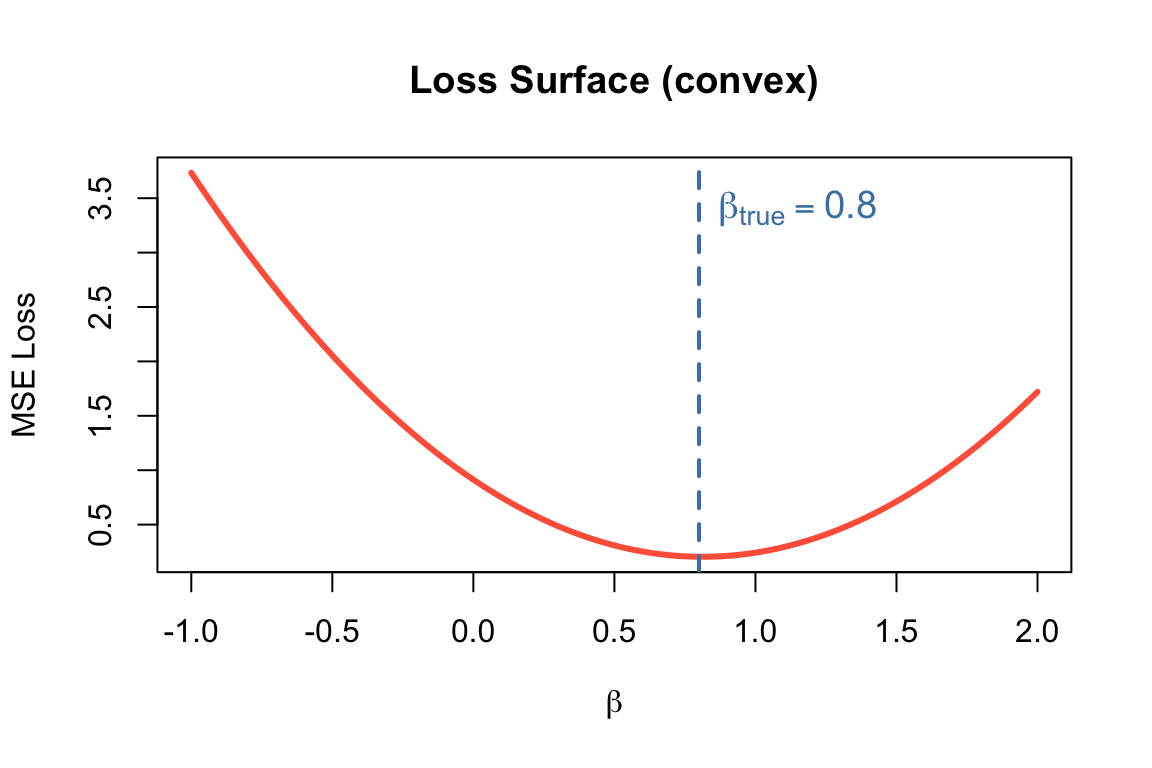
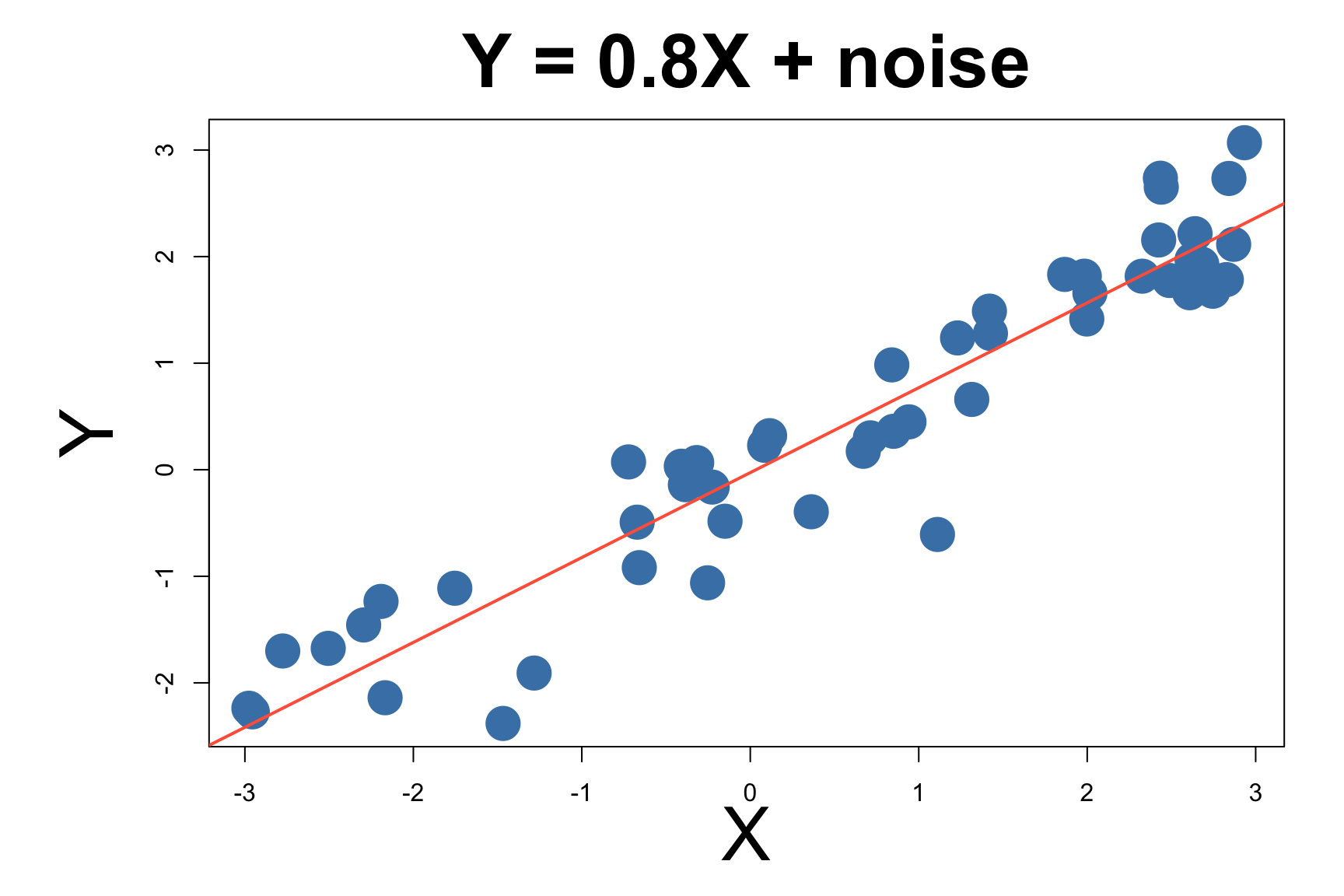
Let’s start with a linear model
\[y = X\beta + \epsilon ~~~~~ \text{where }\epsilon \sim N(0, \sigma)\]
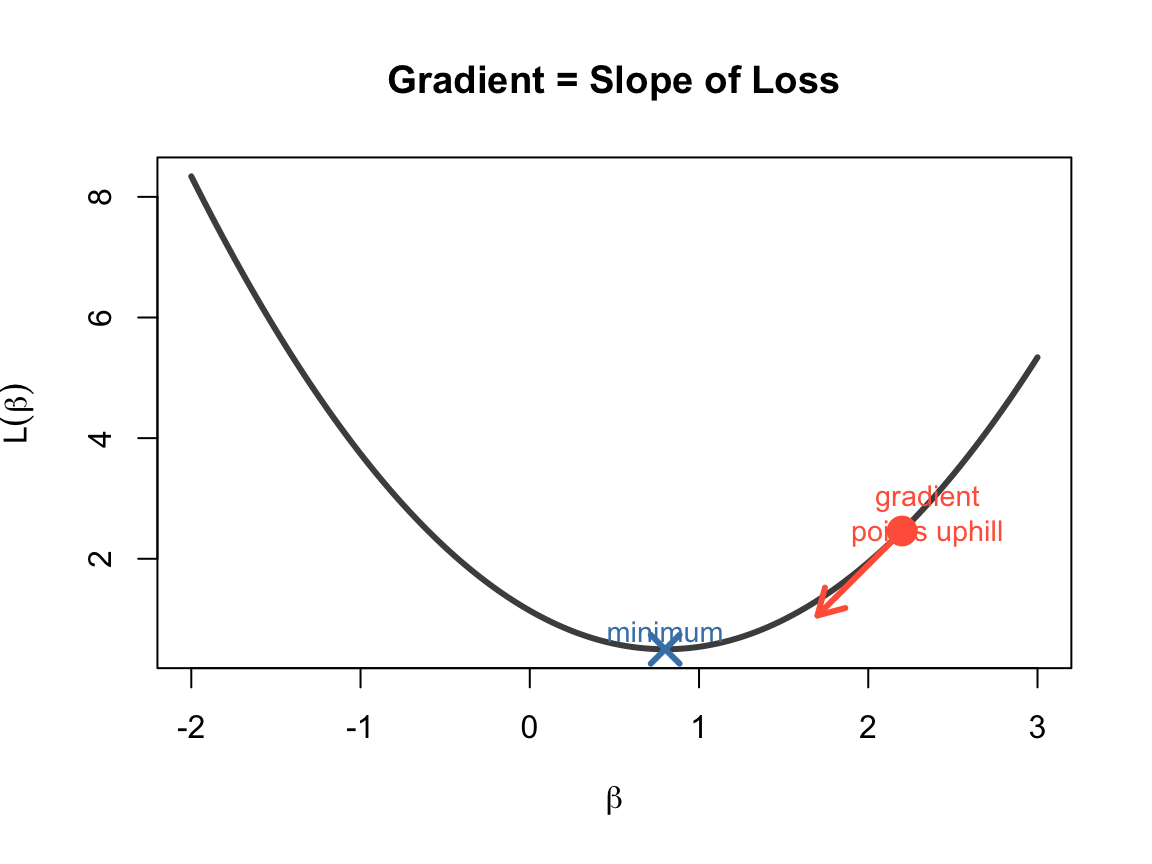
What is a Gradient?
A gradient is the derivative of a function — it tells us the slope.
\[f'(\beta) = \lim_{\Delta\beta \to 0} \frac{f(\beta + \Delta\beta) - f(\beta)}{\Delta\beta}\]
Positive gradient → function is increasing → move leftNegative gradient → function is decreasing → move rightZero gradient → you’re at a minimum (or maximum)
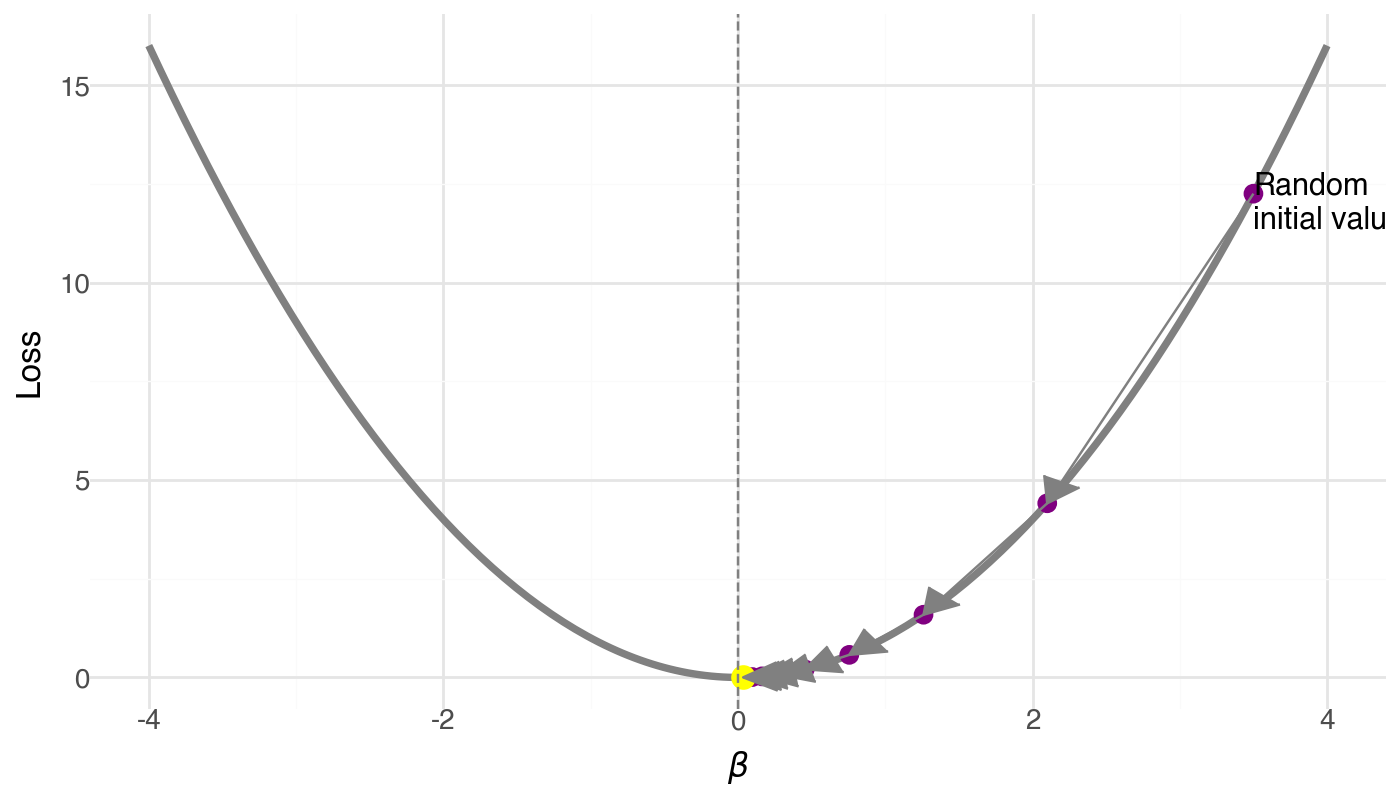
Gradient Descent: Follow the Slope Downhill
Algorithm:
Start at a random \(\beta\) (high loss)
Compute the gradient (slope)
Take a step opposite to the gradient
Repeat until convergence
\(\beta_{t+1} = \beta_t - \alpha \cdot \nabla L(\beta_t)\)
\(\alpha\) = learning rate (step size)
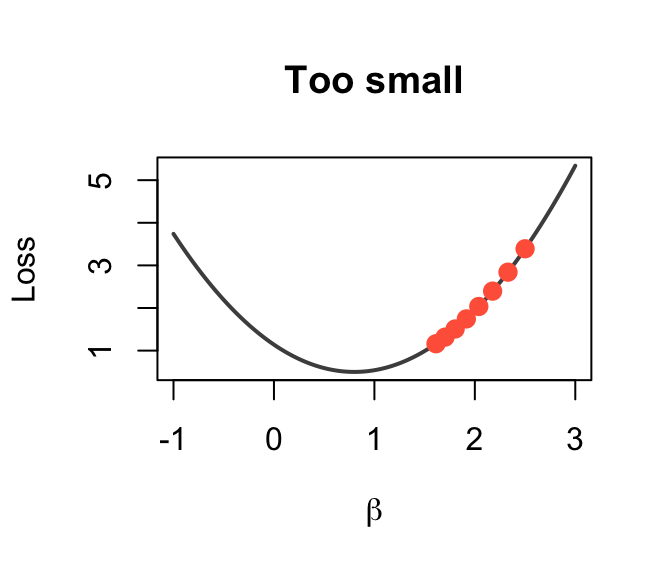
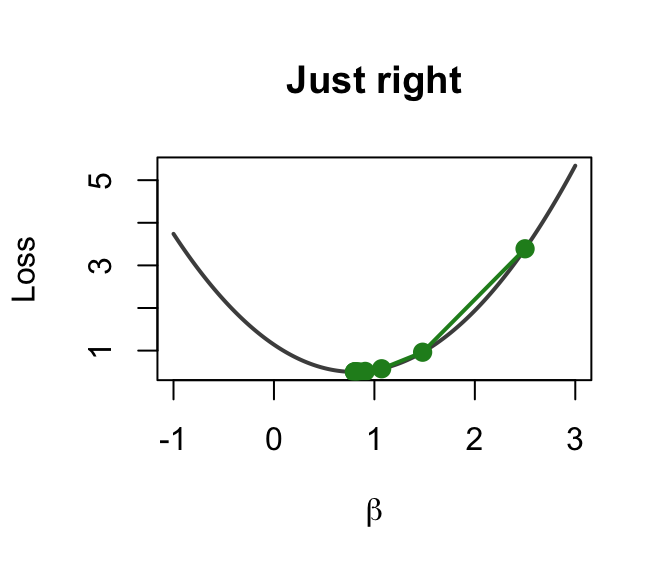
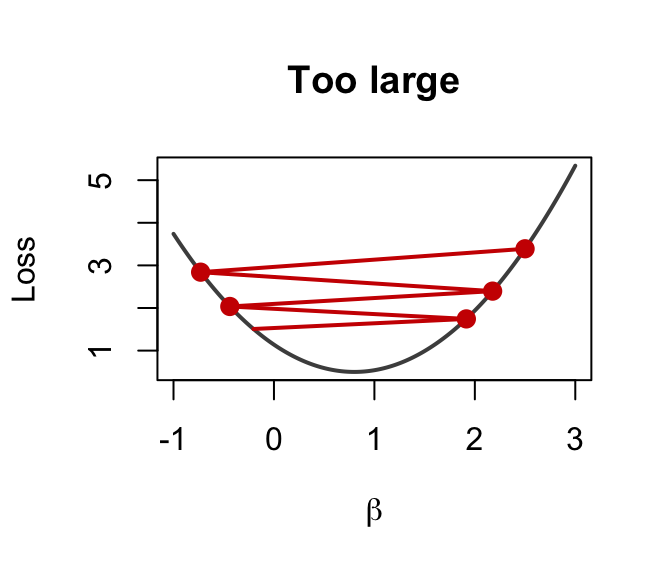
The Learning Rate \(\alpha\)
Too small (\(\alpha = 0.0001\) )
Just right (\(\alpha = 0.003\) )
Too large (\(\alpha = 0.1\) )
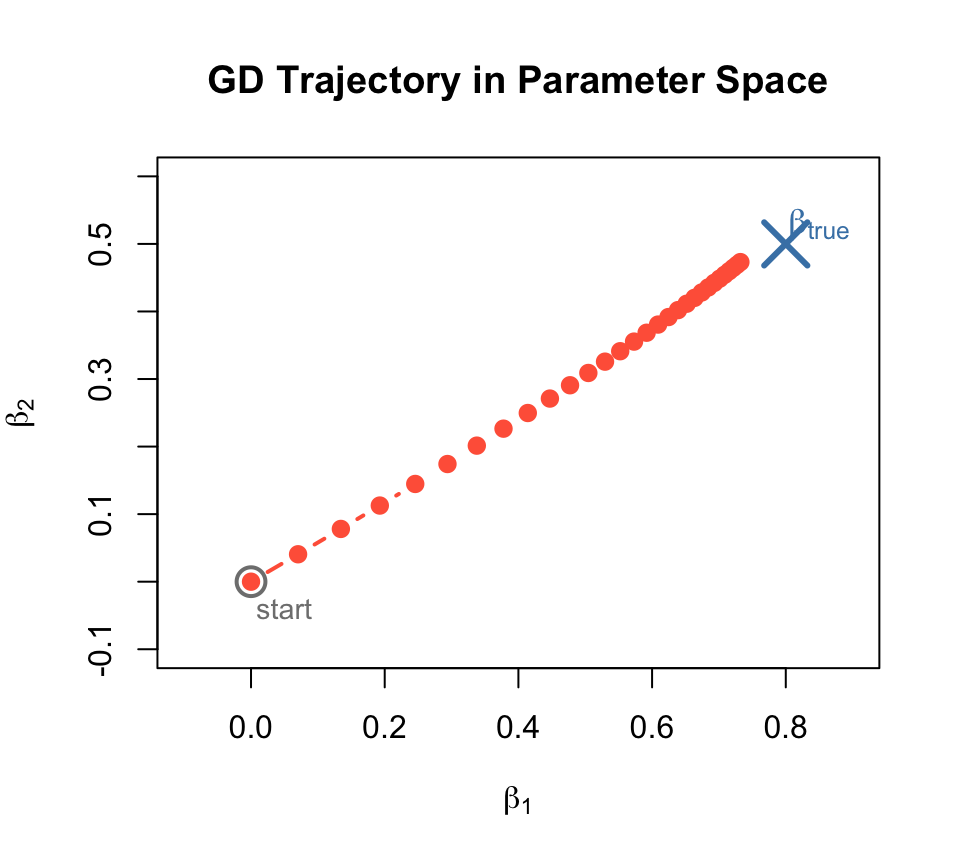
GD Trajectory: Watching \(\beta\) Converge
With 2 parameters (\(\beta_1\) , \(\beta_2\) ), gradient descent traces a path through parameter space:
for _ in range (50 ):= x.dot(b) - y= diff.dot(x) / n-= lr * gradThe trajectory spirals toward the true \(\beta\) .
Stochastic Gradient Descent (SGD)
In practice, computing gradients on all data is expensive.
Solution: use a random mini-batch at each step. \[\nabla L \approx \frac{1}{|B|} \sum_{i \in B} \nabla L_i\]
Stochastic Gradient Descent (SGD)
Full-batch GD:
Exact gradient
Slow per step
Smooth path
SGD (mini-batch):
Approximate gradient
Fast per step
Noisy but effective path
The noise actually helps escape bad local minima!
Three Components of Machine Learning
Every ML model needs these three ingredients:
Model — \(\hat{y} = f(x)\) : defines the hypothesisLoss — \(L(\hat{y}, y)\) : measures how wrong we areOptimizer — \(\beta \leftarrow \beta - \alpha \nabla L\) : updates params to reduce loss
Model \(y = X\beta\) \(y = W_2 \sigma(W_1 x + b_1) + b_2\)
Loss MSE
MSE, cross-entropy, …
Optimizer Normal equation
SGD, Adam, …
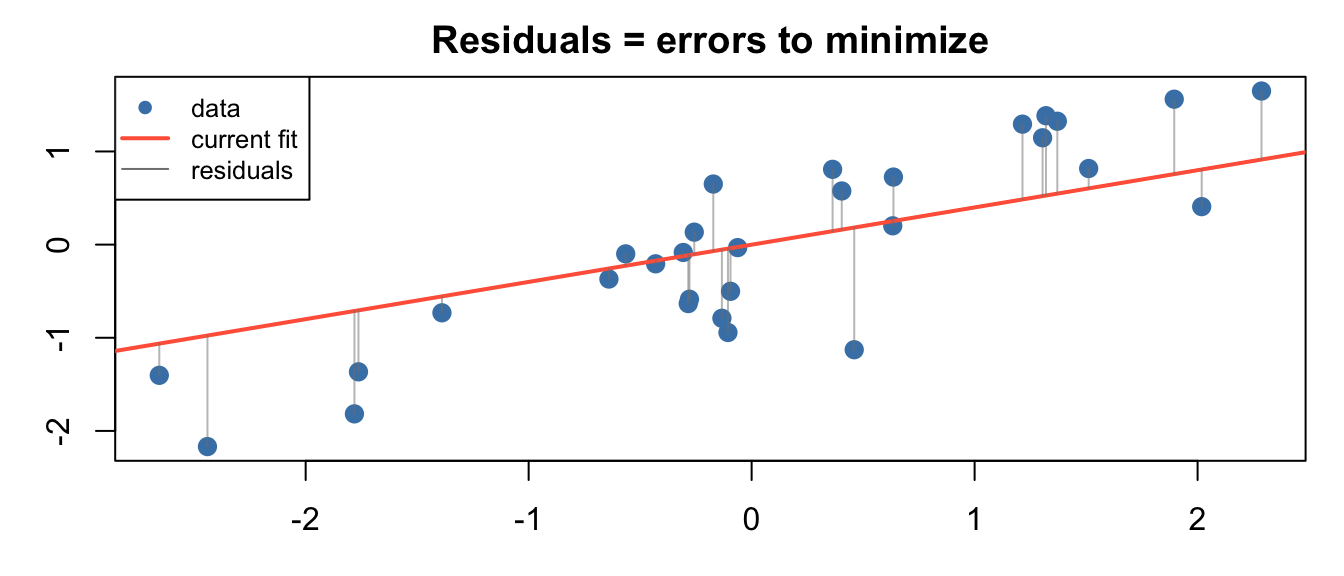
The Loss Function: MSE
Mean Squared Error: \[L(\beta) = \frac{1}{m}\sum_{i=1}^{m} (\hat{y}^{(i)} - y^{(i)})^2\]
Its gradient (for linear model):
\[\frac{\partial L}{\partial \beta_j} = \frac{1}{m}\sum_{i} (\hat{y}^{(i)} - y^{(i)}) \cdot x_j^{(i)}\]
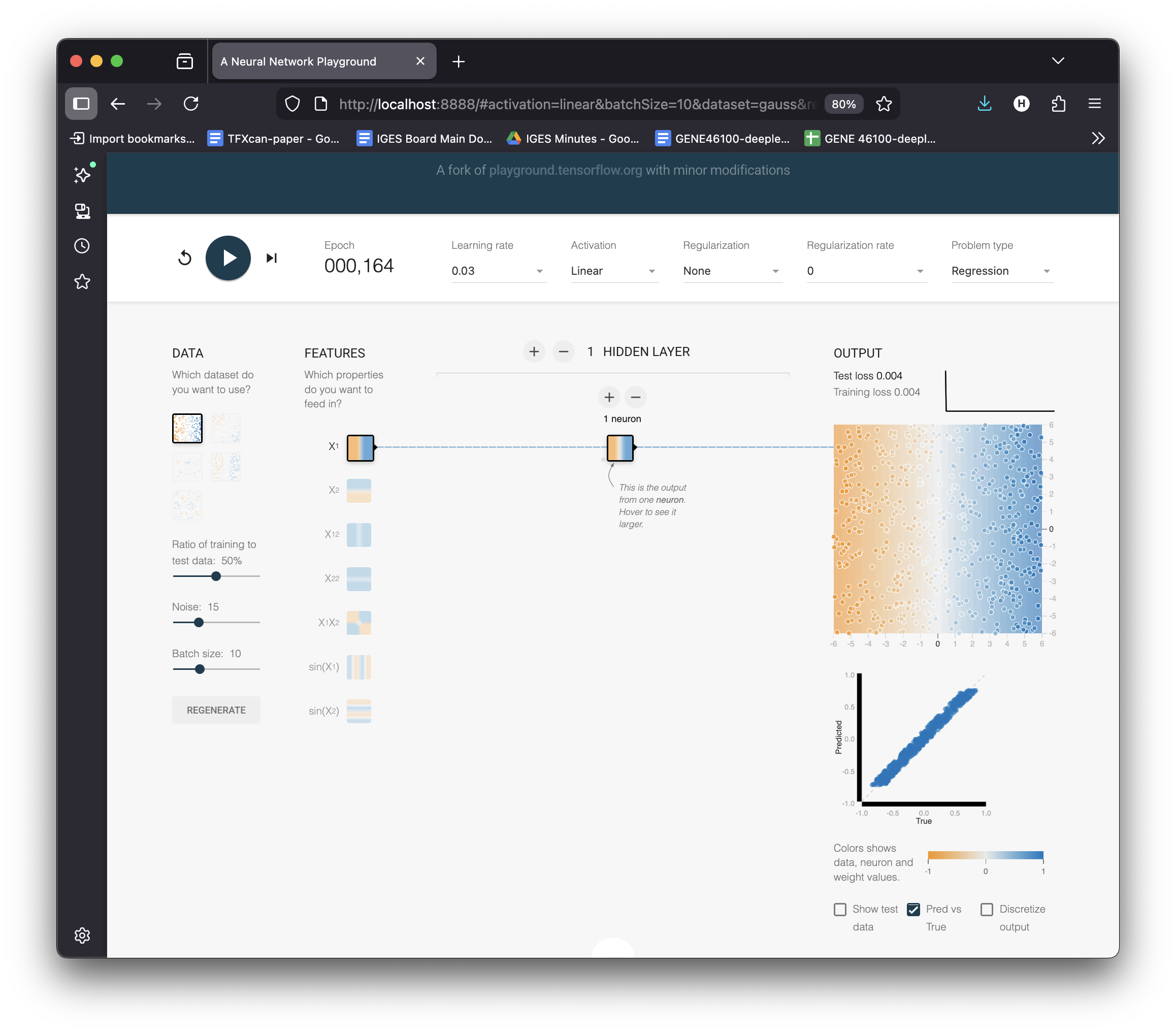
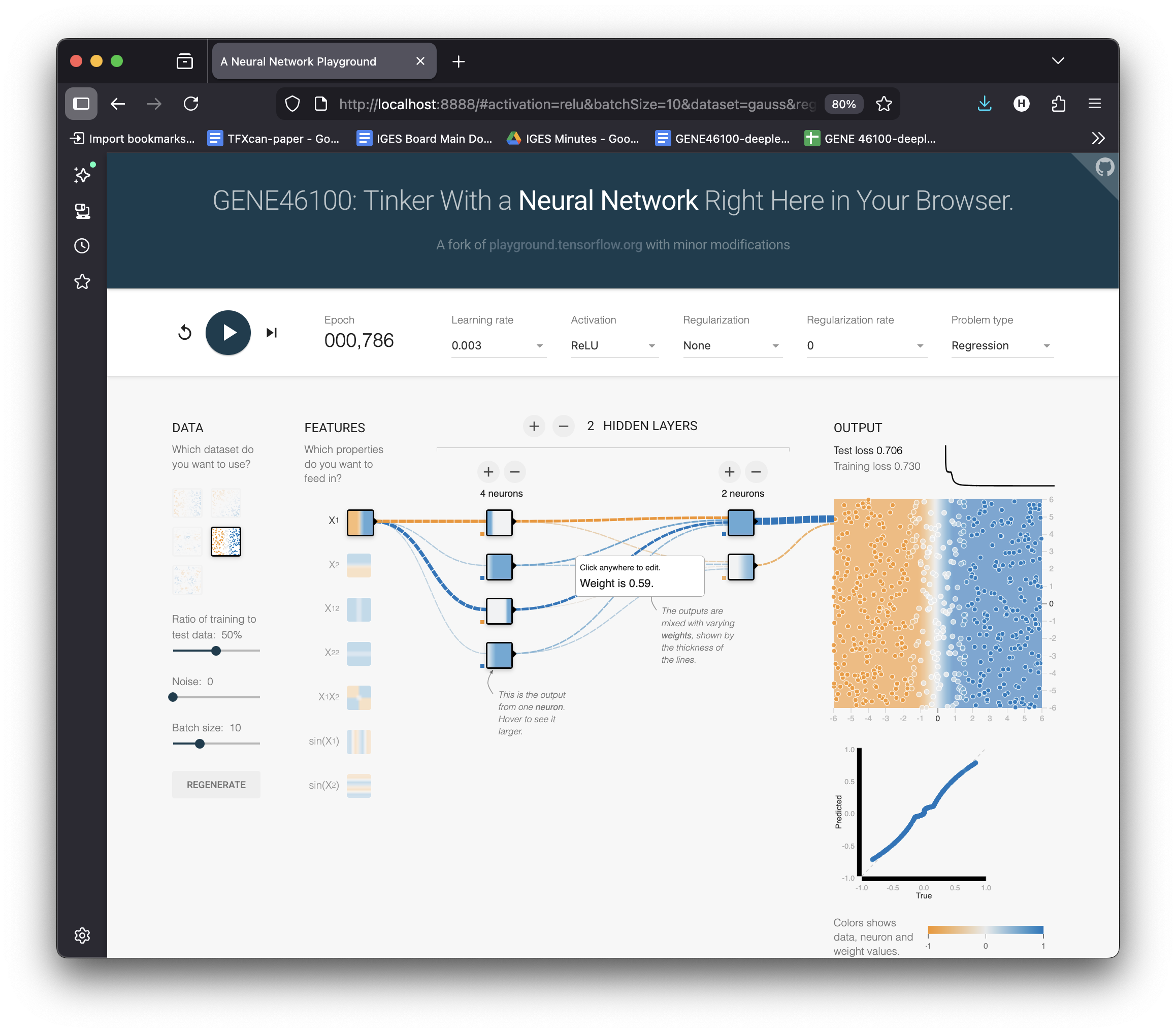
See It Live: Fit a Line in the Playground
Open playground.hakyimlab.org
Settings:
Problem type → Regression
Dataset → reg-plane (linear data)
1 hidden neuron, Linear activation
Hit ▶ Play
Watch the loss curve drop as the gradient descent finds the optimal \(w\) and \(b\) .
Try changing the learning rate — see it converge faster or explode.
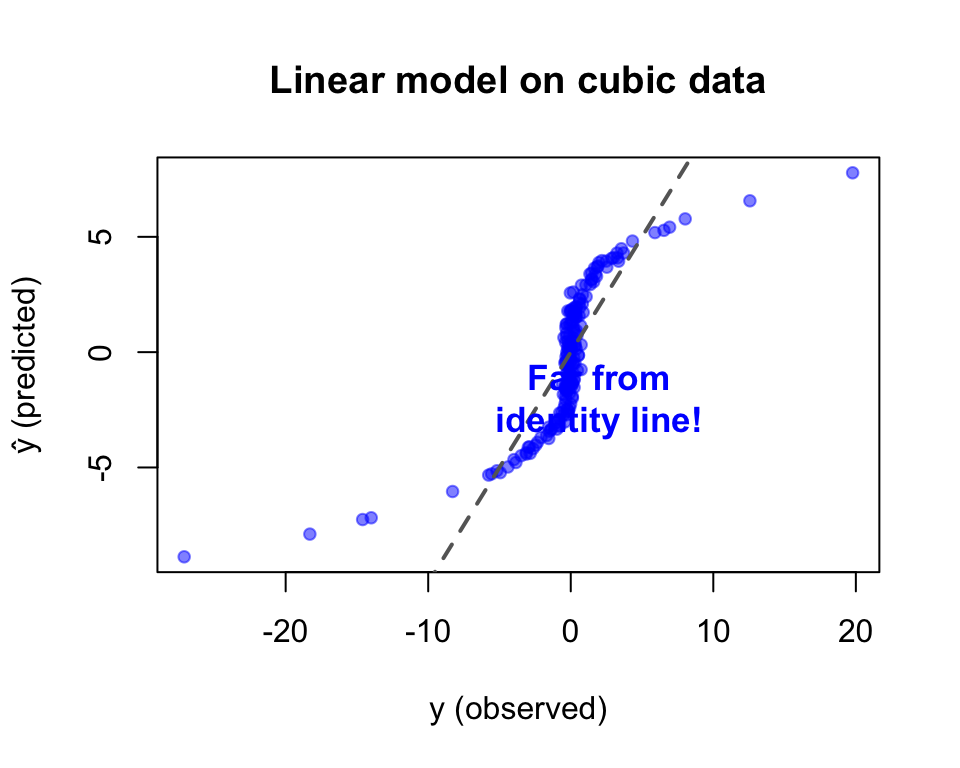
Linear Model Succeeds — On Linear Data
The playground fits \(y = wx + b\) perfectly on the linear dataset.
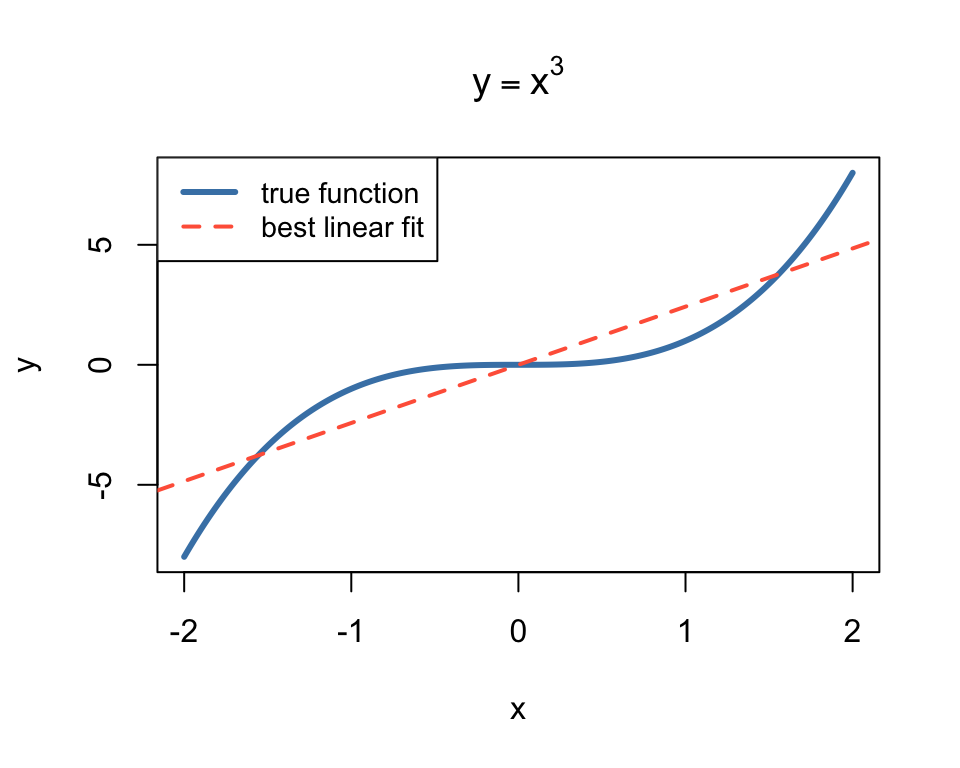
But what if the data isn’t linear?
The best possible linear fit to \(y = x^3\) is still terrible.
No amount of training will fix this — the model is wrong, not the optimizer.
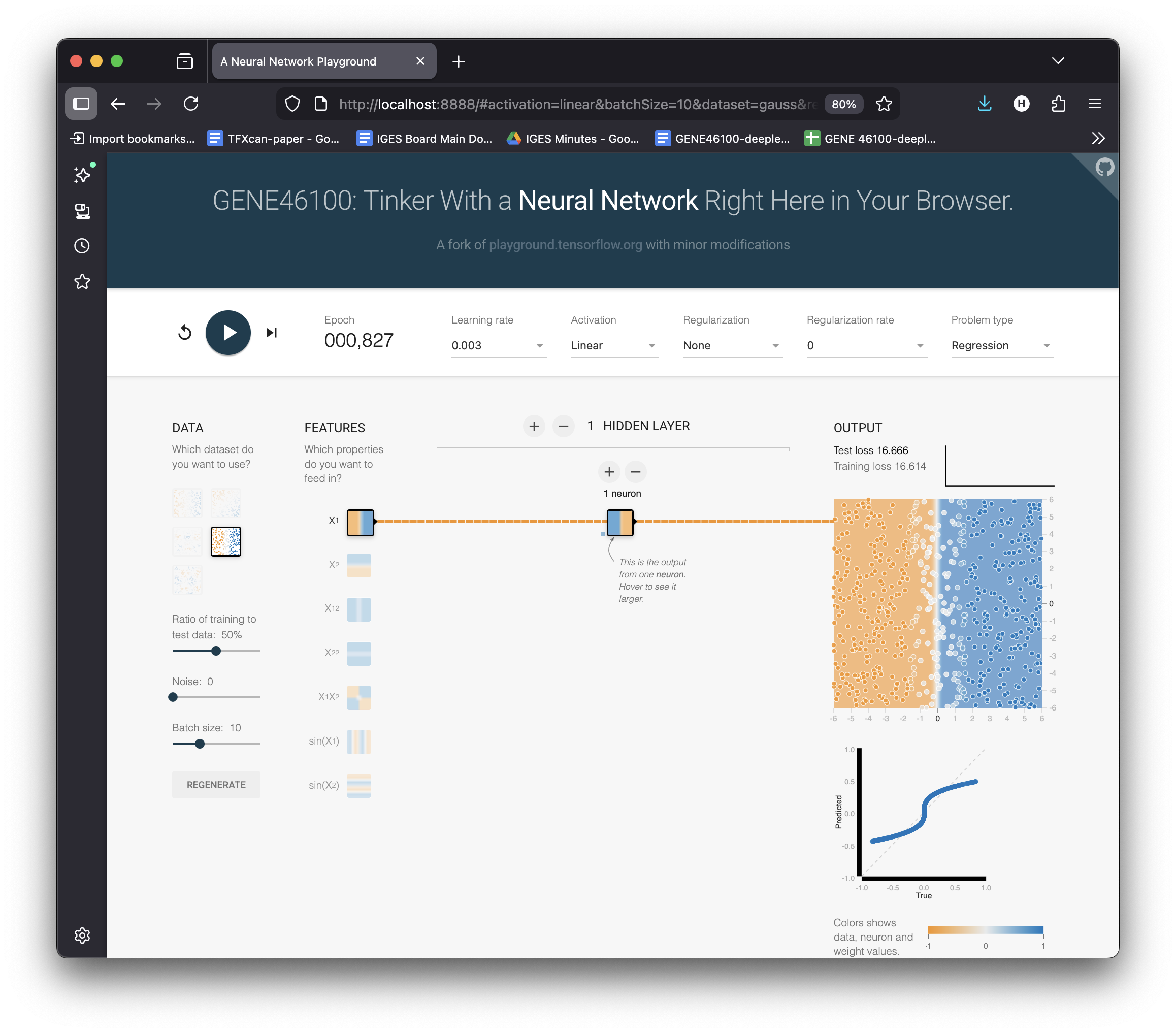
Try Cubic Data in the Playground
Switch to dataset → Cubic (\(y \approx x^3\) )
Keep: 1 neuron, Linear activation
Hit ▶ Play and wait…
Loss stays high. The best linear fit is a flat plane through a curve.
No matter how long you train — a linear model can’t bend.
We need a model that can learn any shape
A model that can learn any shape
Without us specifying the functional form
From data alone
Solution: add nonlinearity → build a neural network.
Multi-Layer Perceptron (MLP)
A neural network with:
Input layer : your featuresHidden layer(s) : with nonlinear activationOutput layer : prediction
\[y = W_2 \cdot \sigma(W_1 x + b_1) + b_2\]
Key insight: \(\sigma\) (activation function) introduces the bends that let the model fit curves.
What Does a Neuron Do?
activation
x₁ ──w₁──┐ function
├──▶ Σ ──▶ σ(·) ──▶ output
x₂ ──w₂──┘ +b
Without activation (linear):
\(\text{output} = w_1 x_1 + w_2 x_2 + b\)
Just a weighted sum — still a line!
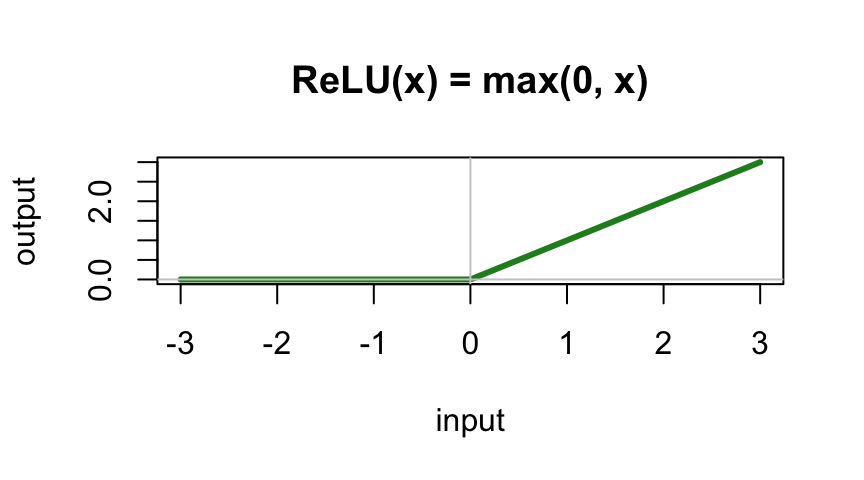
With ReLU activation:
\(\text{output} = \max(0, w_1 x_1 + w_2 x_2 + b)\)
Now it can produce a kink — a bent line!
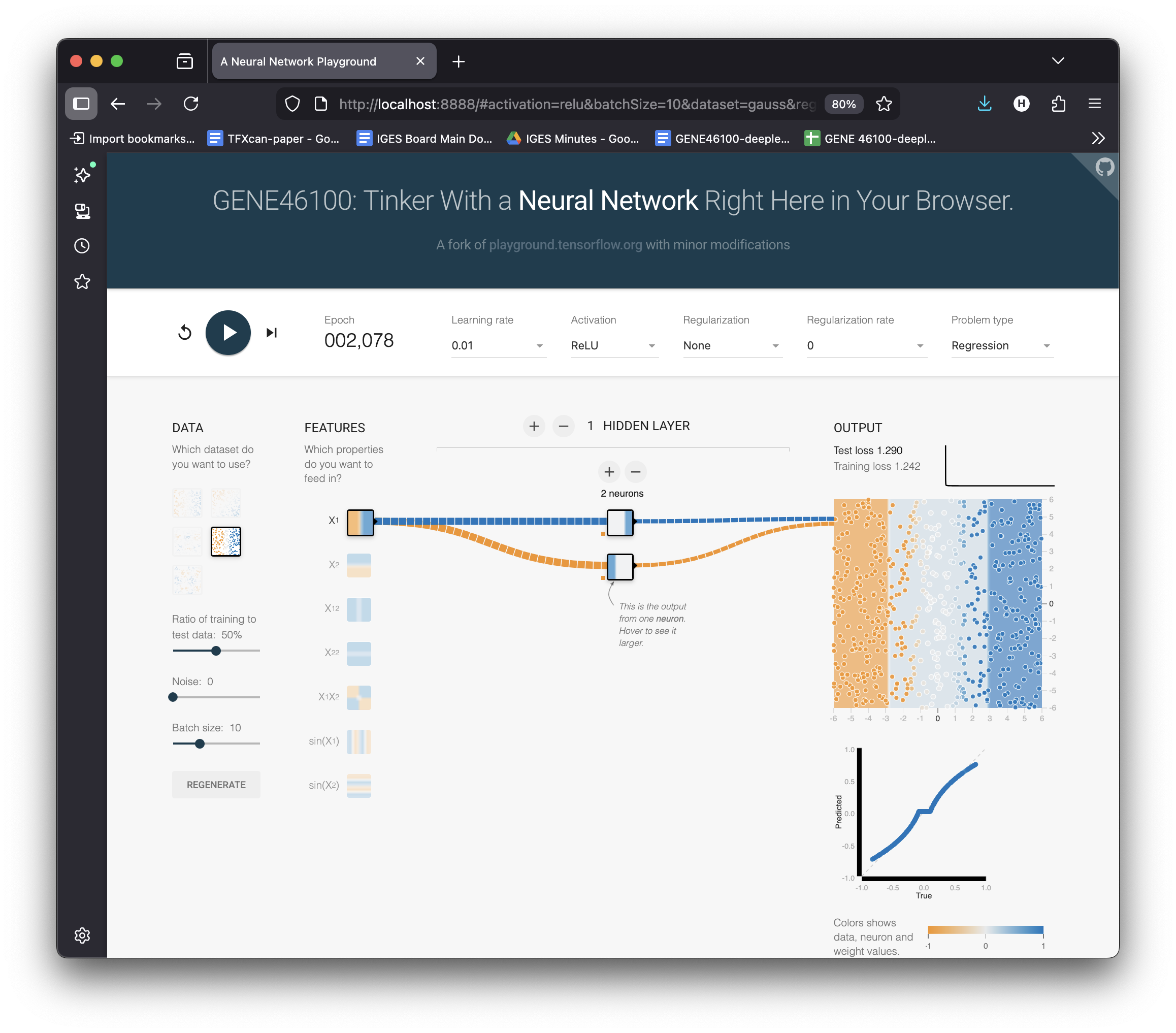
Building Up: 2 Neurons = 2 Bends
Change activation → ReLU
Set hidden layer → 2 neurons
Hit ▶ Play
Select Pred vs True to show the scatter plot
Each neuron contributes one ReLU “kink.” Combined, they approximate a curve — but it’s rough.
Loss is lower, but the fit isn’t great yet.
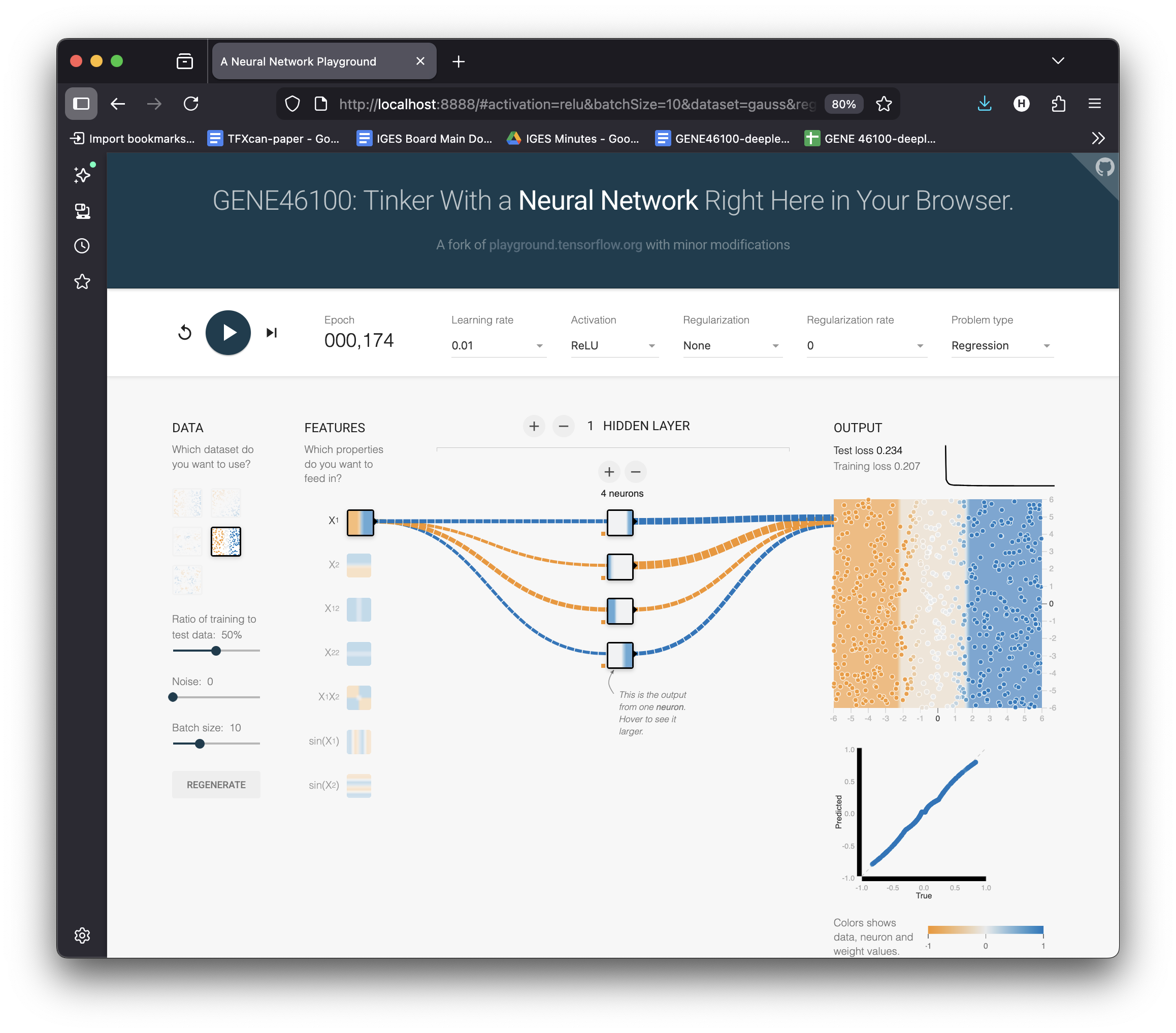
4 Neurons = 4 Bends = Smoother
Increase to 4 neurons
Hit ▶ Play
Select Pred vs True to show the scatter plot
More neurons = more “kinks” = smoother approximation of \(x^3\) .
Adding Depth: 2 Layers (4 → 2)
Add a second layer: 4 neurons → 2 neurons
Hit ▶ Play
Layer 1 learns basic bends → Layer 2 combines them into a smooth curve.
Stacking layers = composing simple features into complex functions.
The MLP Progression — Summary
LINEAR (1 neuron, no activation) 2 NEURONS + ReLU
┌────────────────────────┐ ┌────────────────────────┐
│ ────────────── │ │ ─────╱ │
│ flat line │ │ ╱────── │
│ can't bend! │ │ two bends │
└────────────────────────┘ └────────────────────────┘
4 NEURONS + ReLU 2 LAYERS (4→2) + ReLU
┌────────────────────────┐ ┌────────────────────────┐
│ ╱‾‾‾╲ │ │ ╱‾‾‾╲ │
│ ─────╱ ╲───── │ │ ─────╱ ╲───── │
│ four bends │ │ smooth curve │
└────────────────────────┘ └────────────────────────┘
A neural network approximates any function by combining simple bent lines.
Counting Parameters
Exercise: count parameters for this network:
Input: 2 features
Hidden: 3 neurons
Output: 1
x₁ ──┬──▶ h₁ ──┐
├──▶ h₂ ──┼──▶ ŷ
x₂ ──┴──▶ h₃ ──┘. . .
Layer 1: 2×3 weights + 3 biases = 9
Layer 2: 3×1 weights + 1 bias = 4
Total: 13 parameters
Manually computing gradients for 13 parameters is tedious. For millions? Impossible.
This is why we need PyTorch.
Why the Activation Function Matters
Without activation, stacking layers is pointless:
\[W_2(W_1 x) = (W_2 W_1) x = W'x\]
Any number of linear layers = one linear layer!
Try it yourself: set activation to “Linear” in the playground. Add as many layers as you want — the output is always a flat gradient.
Why the Activation Function Matters
The activation function breaks linearity, allowing each layer to add new “bends.”
Common activations:
ReLU : \(\max(0, x)\) — fast, simpleTanh : \(\frac{e^x - e^{-x}}{e^x + e^{-x}}\) — S-curveSigmoid : \(\frac{1}{1+e^{-x}}\) — for probabilities
Universal Approximation Theorem
An MLP with a single hidden layer can approximate any continuous function to arbitrary accuracy, given enough hidden neurons.
In playground terms: with enough neurons, you have enough bends to trace any curve.
What this doesn’t tell you:
How many neurons you need
Whether it will learn efficiently
Whether it will generalize to new data
From Playground to PyTorch
The playground does everything behind the scenes. In PyTorch, you write it:
1. Define the model:
class MLP(nn.Module):def __init__ (self , input_dim, hid_dim,super ().__init__ ()self .fc1 = nn.Linear(input_dim, hid_dim)self .fc2 = nn.Linear(hid_dim, output_dim)def forward(self , x):= F.relu(self .fc1(x))return self .fc2(x).squeeze(1 )
2. Train it:
= MLP(1 , 1024 , 1 )= torch.optim.SGD(= 0.001 )= nn.MSELoss()for epoch in range (10000 ):= model(x) # forward = loss_fn(y_hat, y) # loss # gradients # update # reset
PyTorch ↔︎ Playground
MLP(input_dim, hid_dim, output_dim)Network architecture (boxes)
F.relu(...)Activation dropdown
model(x)Data flows through network
loss_fn(y_hat, y)Loss number updates
loss.backward()Gradients computed (invisible in playground)
optimizer.step()Weights change, output updates
lr=0.001Learning rate slider
PyTorch gives you full control over what the playground hides.
The Training Loop — Visually
%%{init: {'theme': 'base', 'themeVariables': {'fontSize': '22px', 'nodePadding': 16}}}%%
flowchart LR
A[Input Data] --> B["Forward Pass<br/>model(x)"]
B --> C["Compute Loss<br/>loss_fn(ŷ, y)"]
C --> D["Backward Pass<br/>loss.backward()"]
D --> E["Update Params<br/>optimizer.step()"]
E --> B
Each iteration of this loop = one “tick” of the playground.
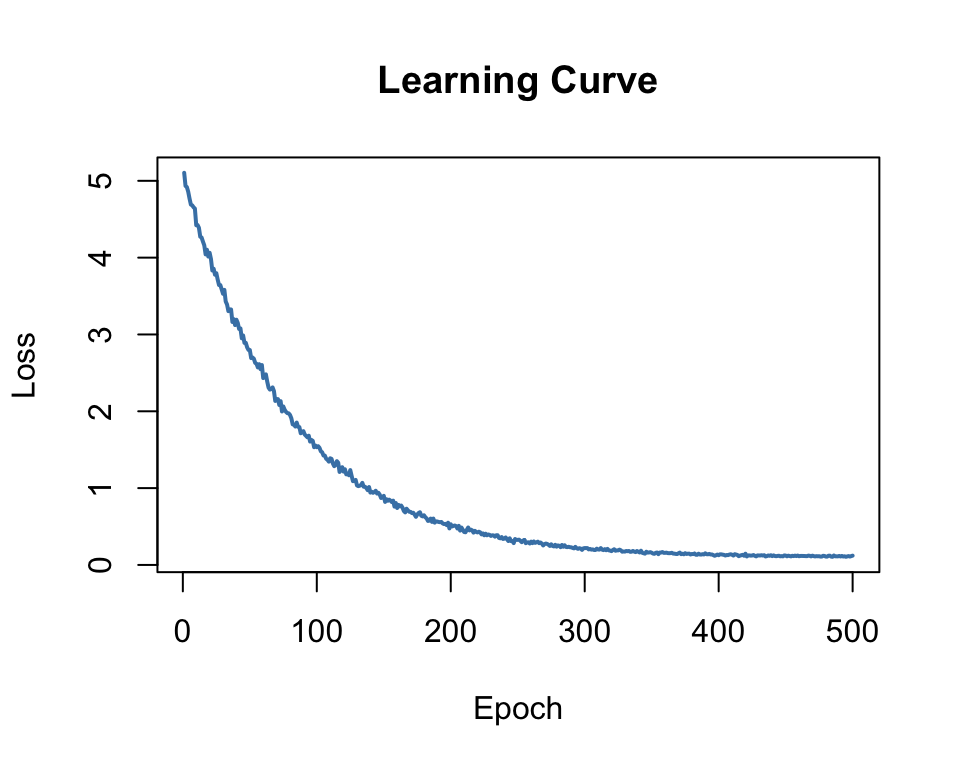
The Learning Curve
Plot loss vs epoch to monitor training:
= []for epoch in range (10000 ):range (10000 ), learning_curve,= "epoch" , ylab= "loss" )
Dropping = model is learningFlat = converged (or stuck)Increasing = learning rate too high!
Your Turn: Explore the Playground
Open playground.hakyimlab.org and try:
Regression → Cubic : increase neurons from 1 to 8 — watch the fit improveSwitch to Classification → Circle : same idea, different taskSet activation to Linear — can it ever fit a curve or separate a circle?Crank learning rate to 1.0 — what happens to the loss?Turn on “Show test data” — is a big network overfitting?
DNA as Data: One-Hot Encoding
How do we feed DNA to a neural network?
Sequence: A T G C G T A
A T G C
1: [ 1 0 0 0 ] ← A
2: [ 0 1 0 0 ] ← T
3: [ 0 0 1 0 ] ← G
4: [ 0 0 0 1 ] ← C
5: [ 0 0 1 0 ] ← G
6: [ 0 1 0 0 ] ← T
7: [ 1 0 0 0 ] ← AShape: (sequence_length, 4)
Each base → a 4-dimensional unit vector. No ordinal relationship imposed.
From DNA to Prediction
DNA sequence One-hot matrix Neural network Prediction
ATGCGTAACG... → ┌─────────────┐ → ┌──────────┐ → binding score
│ 1 0 0 0 │ │ MLP or │ expression level
│ 0 1 0 0 │ │ CNN │ variant effect
│ 0 0 1 0 │ │ │ ...
│ 0 0 0 1 │ └──────────┘
│ ... │
└─────────────┘
This is the core pattern of the most of the course.
Every model we study takes DNA sequence as input and predicts a biological output.
MLP vs CNN: A Preview
MLP (this unit)
Flatten DNA → single vector
Every input connected to every neuron
No concept of “position”
Good for learning the basics
CNN (next)
Preserve sequential structure
Sliding window = motif scanner
Learned filters ≈ PWMs
The workhorse of genomic DL
A CNN filter sliding over one-hot DNA is mathematically equivalent to scoring with a Position Weight Matrix (PWM) — but learned from data!
Unit 0 Plan: Weeks 1–3
Week 1a
Setup, intro
(this lecture)
Week 1b
Linear → MLP in PyTorch
hands-on-introduction_to_deep_learning.ipynb
Week 2
CNN for DNA scoring
updated-basic_DNA_tutorial.ipynb
Week 3a
TF binding project
tf-binding-prediction-starter.ipynb
Week 3b
Hyperparameter tuning
tf-binding-wandb.ipynb
What’s Coming Next
Unit 1: Transformers & GPT
Attention mechanism
Karpathy’s nanoGPT
Train a DNA language model
Fine-tune for promoter prediction
Unit 2: Enformer & Borzoi
Predict epigenome from 200kb DNA
Variant effect prediction
Connection to GWAS/PrediXcan
The arc: MLP → CNN → Transformer → Genomic foundation models
Resources
Videos:
Interactive:
Getting Started
Environment: Google Colab (GPU provided, no local setup needed)
First notebook: hands-on-introduction_to_deep_learning.ipynb
= torch.device('cuda' if torch.cuda.is_available() else 'cpu' )